Contents
- Linearity: A physicist maxim: Everything is linear to first order
- Now consider the local deviations from linearity by looking at groups of 3 consecutive points. The linear approximation locally for the middle point, y(j+1) is y(j) + (y(j+2)-y(j))/2. The error is the difference between that and the actual value of y(j+1)
- The Impulse response
- It follows that if we have an input function that is made up piece-wise of discrete values, e.g.
- We can anticipate an output from our function that is made up of the scaled and shifted outputs to each of the discrete inputs
- Added together...
- This is the meaning of a convolution. MATLAB has this built in (of course)
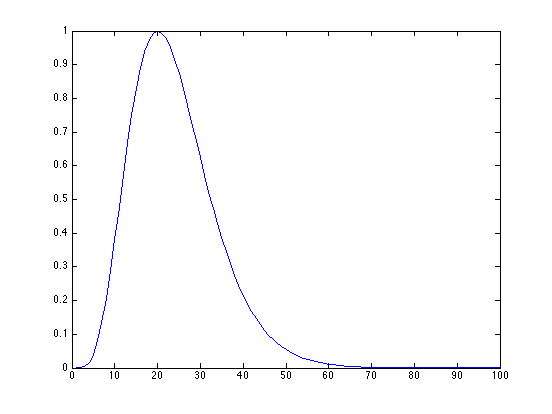
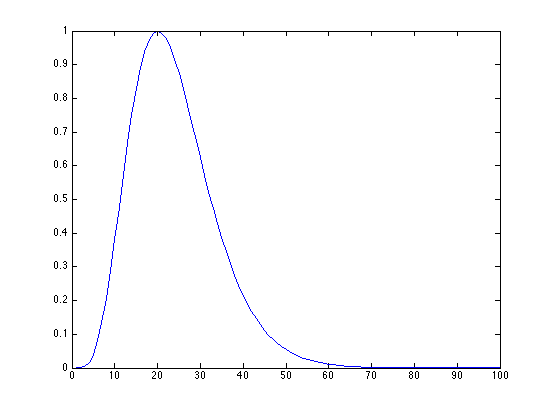
Linearity: A physicist maxim: Everything is linear to first order
% Consider a very complex and non-linear function: x = 1:100; y =(x./20).^5 .* exp(5-(x./4)); % (this is the so-called 'gamma' function) % Why is this non-linear? Because y(A*x) does not equal A*y(x) plot(x,y);
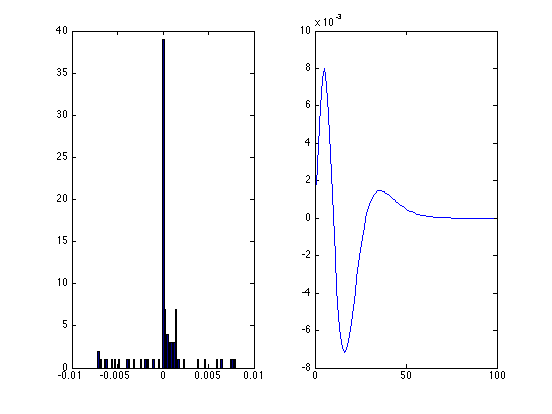
Now consider the local deviations from linearity by looking at groups of 3 consecutive points. The linear approximation locally for the middle point, y(j+1) is y(j) + (y(j+2)-y(j))/2. The error is the difference between that and the actual value of y(j+1)
errors = zeros(1,98); for j=1:98 errors(j) = y(j) + (y(j+2)-y(j))/2 - y(j+1); end; mean(errors) std(errors) subplot(1,2,1) hist(errors, 100) subplot(1,2,2) plot(x(1:98),errors)
ans =
-4.4157e-06
ans =
0.0028
The Impulse response
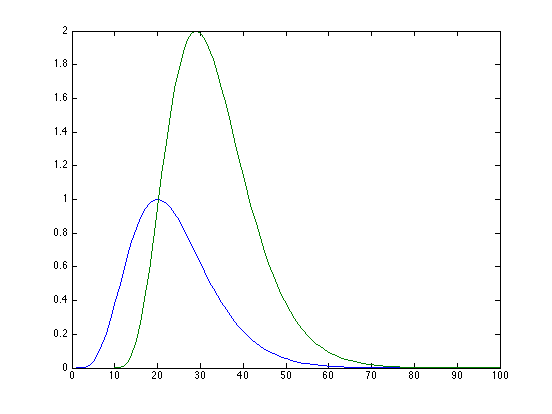
If a system is linear, and its output to a response of area A and duration -> 0 is A(I(t)), then its response to an input of area B at time T will be B(I(t-T) Since we have it here, let's assume that that the initial response looks like our function y
clf; A = 1; B = 2; plot(x,A*y);
hold all;
plot(x(10:100),B*y(1:91));
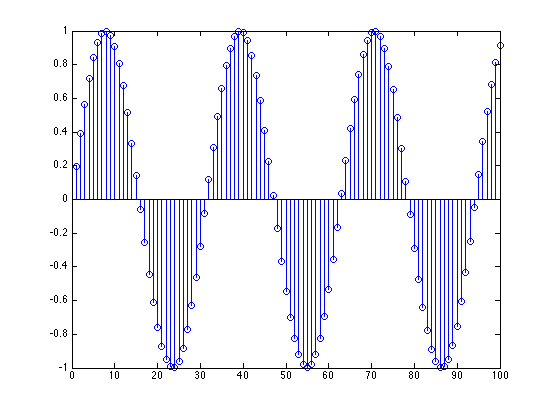
It follows that if we have an input function that is made up piece-wise of discrete values, e.g.
clf; f = sin(x/5); stem(x,f)
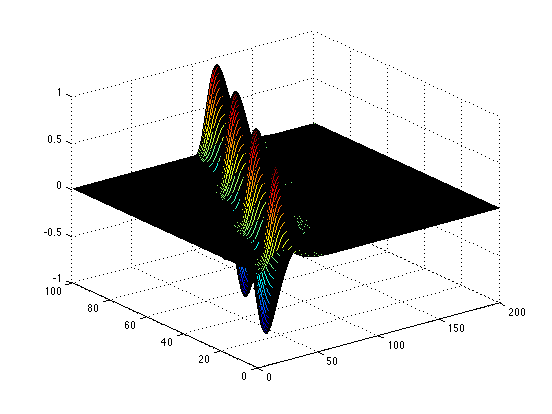
We can anticipate an output from our function that is made up of the scaled and shifted outputs to each of the discrete inputs
scale_shift = zeros(100,200); for j=1:100 scale_shift(j,j:j+99) = f(j) * y; end surf(scale_shift)
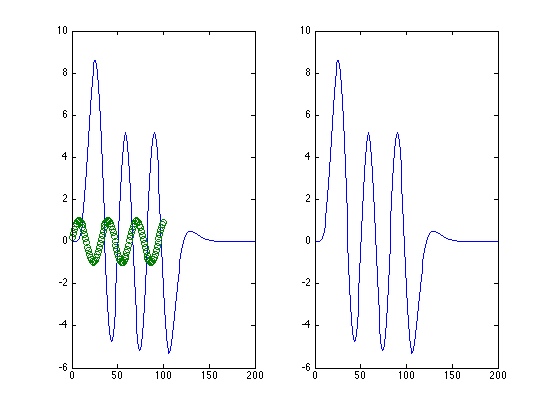
Added together...
subplot(1,2,1); output = sum(scale_shift); plot(output); hold; scatter(x,f);
Current plot held
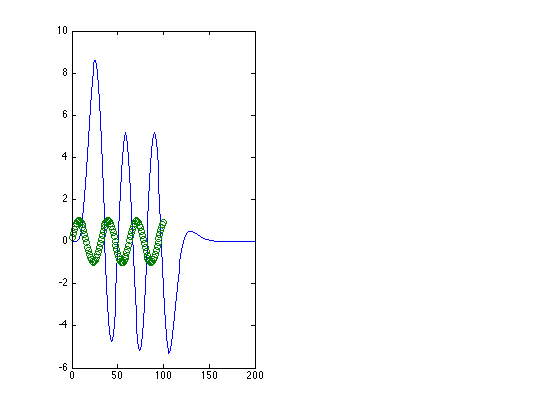
This is the meaning of a convolution. MATLAB has this built in (of course)
subplot(1,2,2) plot(conv(f,y));